Amadee-20-AMAZE
Details
| Acronym | AMAZE |
| Description | Visual-inertial Navigation for aerial Planetary Exploration for the NASA MARS2020 mission |
| Principal Investigator (PI) | Stephan Weiss | Stephan.Weiss@aau.at |
| Organisation | Institute of Smart System Technologies |
| Co-Investigators | Christian Brommer, Institute of Smart System Technologies |
Summary
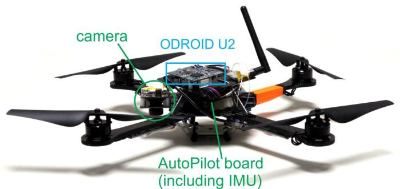
Proposed multi-copter platform, (c) AMAZE team
AMAZE is the second aerial drone experiment participating in AMADEE-20 (in addition to AEROSCAN). It is designed as a technology
demonstrator in preparation of NASA’s Mars Helicopter Scout to be launched in 2020 together with the next rover mission to Mars. The experiment’s objectives center around testing algorithms for GNSS independent visual-inertial based localization. It is a follow-up to the AVI-NAV experiment participating in AMADEE-18. In AMADEE-18 the experiment team demonstrated that such localization is feasible on Mars-like surfaces given a favorable selection of daytime and surface structure. The objectives to be
tested by the AMAZE experiment are:
- Autonomous take-off under different environmental and surface conditions
- Autonomous waypoint following and mission plan execution, i.e. evaluate the robustness of surface relative navigation for a defined trajectory
- Autonomous landing on safe landing sites (optional)
During the bridge-head phase where members of the experiment team will conduct on-site tests with the potential next-generation Mars Helicopter Scout algorithms and Mars Helicopter Scout mission-relevant scenarios will be flown autonomously. For the isolation phase, a modified version of the code, depending on the classification of the code developed jointly with JPL, may be used.
Experiment Data
| Date | Files |
|---|---|
| 2021-10-20 | Zip-file from Bringup |
| 2021-10-22 | Multiple Pictures, Afternoon Troubleshooting, Bringup Zipfile, Logs |
| 2021-10-24 | 2 pics of failure messages |
| 2021-10-25 | 18 images |
| 2021-10-26 | Multiple scripts and bringup files |