Amadee-20-AEROSCAN
Details
| Acronym | AEROSCAN |
| Description | Test an autonomous solar-powered Vertical take-off and Landing (VTOL) drone for the Martian surface analysis and photogrammetry |
| Principal Investigator (PI) | Vittorio Netti | drone@domeproject.space |
| Organisation | Airvision srl, Italy |
| Co-Investigators | Andrea Beggio, Airvision srl Paolo Guardabasso, Valispace GmBH Francesco Guerra, IUAV |
Summary
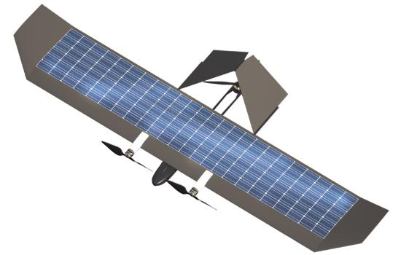
The X-5 Solar VTOL Drone, (c) AEROSCAN team
For future (human) Mars missions, aerial drones can be an essential asset. They can assist in logistics, search and rescue, multi-spectral analysis and similar tasks. Especially in the field of surface photogrammetry aerial drones can help to close a gap: rovers can obtain high-precision data, but only cover a comparatively small area in a given time and orbiters can cover an extensive area of survey, but without the needed precision.
The AEROSCAN project’s aim is to design, assemble and test an autonomous, solar-powered VTOL (vertical take-off and landing) drone for surface analysis and photogrammetry. The X-5 drone is an experimental concept for an autonomous aerial platform designed to complement human crews on the Martian surface. Thanks to its VTOL and automatic flying capabilities, the drone can autonomously take off and reach the mission objectives without the need of direct control from the crew. The main objective of this project is to demonstrate the reliability and the capability of an autonomous solar aerial drone platform for surface surveys. The secondary
objective is to demonstrate the capability for an on-site human mission to operate the drones and to be able to collect useful data about the surface.
Using the photogrammetry technique known as structure from motion (SfM), where 2-D images are transformed into 3-D topographic surfaces high-resolution topographic imagery will be obtained.
The main payload will be one of the following: either a global shutter camera for photogrammetry survey and a multi-spectral camera for surface analysis. Additionally, the drone carries a sensor array of a pressure, a hygrometric and a temperature sensor.
Experiment Data
| Date | Files |
|---|---|
| 2021-10-15 | 2 .jpg, 1 folder: Damage_after_failiure (containing 8 .jpg) |
| 2021-10-17 | 1 folder: Wiring_and_fuselage_issues_on_AEROSCAN_backup_vehicle (containing 2 .jpg) |
| 2021-10-18 | Aeroscan report |
| 2021-10-20 | crash report, pictures of broken parts |
| 2021-10-27 | 2 screenshots, 1 report |
| 2021-11-01 | zip summary |